|
公司基本资料信息(xī)
|
|||||||||||||||||||||||||
特点
通过广泛使用的(de)控制器NJ/NX/NY系列编程语言(IEC 61131-3),Ethernet可直接控(kòng)制机器(qì)人
四(sì)轴臂(bì)均匀分担(dān)机器人负载
快(kuài)速、高精度搬运和装(zhuāng)配
采(cǎi)用高载荷能力设计,支持各种抓手(多个抓取)
支持在传(chuán)送带上快速抓取与放置
符合美国农业部防(fáng)止产品(pǐn)污(wū)染的卫生标准(USDA)
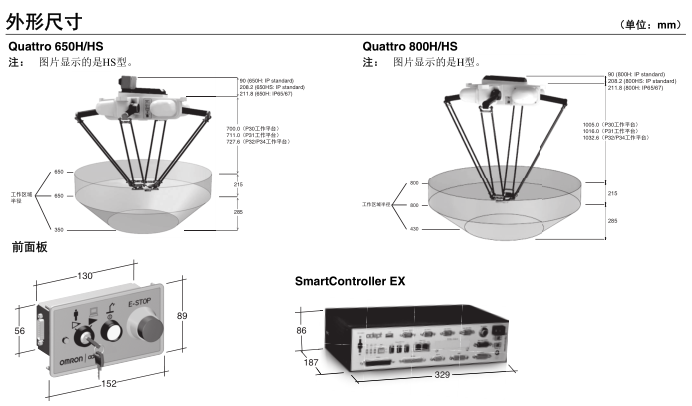
Quattro 650H/HS*大工作直径1,300 mm
工作高度500 mm
Quattro 650H/HS*大(dà)有效载荷15 kg
重量117 kg
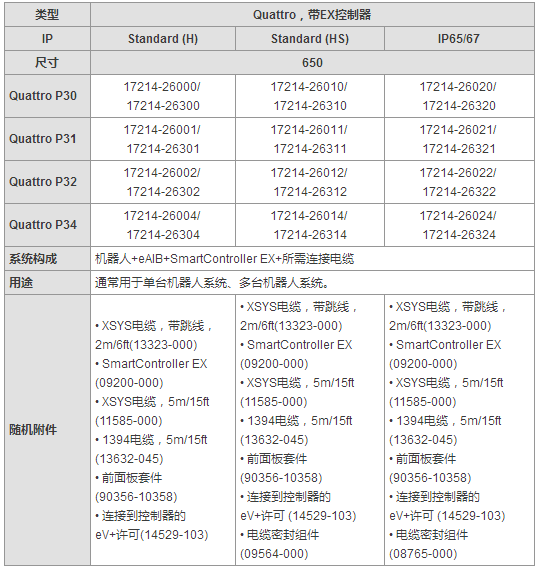
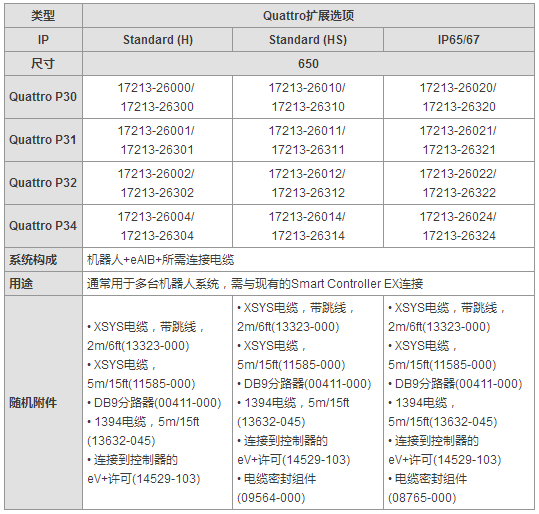
机器人部件代码与随机附件
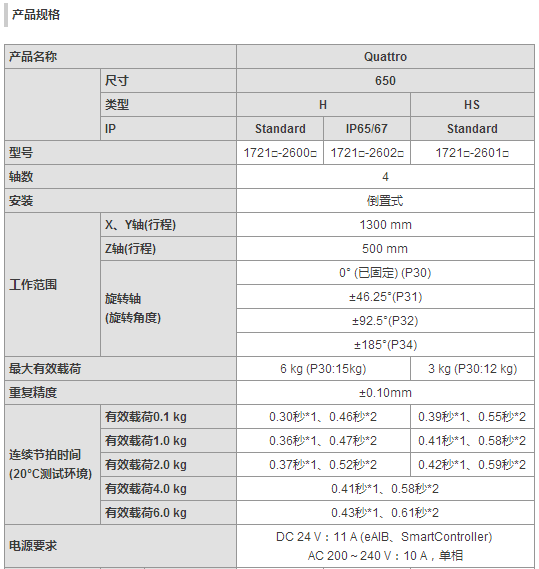
产品规格

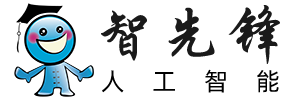
外形尺(chǐ)寸

 沪公网备31010102005835号
沪公网备31010102005835号


良信息举报中心")
络110")
扫一(yī)扫,反馈当(dāng)前页(yè)面
微信公众号



 通过认证
通过认证 交谈/留言")